|
Madrid, 28 al 30 de Marzo de 2001
[OBJETIVO] [COMITÉS] [PARTICIPANTES] [ÁREAS] [ACTIV.INTERNACIONALES] [PROGRAMA] [MESAS REDONDAS] [S.CIENTÍFICAS] [S.TECNOLÓGICAS] [PÓSTERS] [INSCRIPCIÓN]
![]() SESIÓN CIENTÍFICA 5
SESIÓN CIENTÍFICA 5
Herrera Gutierrez, Gerardo1; Labajo Rodilana, Gabriel2; Fernández Marín, Marcos1; Lozano Ibañez, Miguel1; Vera Mahiques, Lucía1; Carrasco Moya, Juan1.
1
Grupo ARTEC- Instituto de Robótica. Universidad de Valencia.
1. INTRODUCCIÓN
Este artículo presenta una nueva herramienta educativa que, en forma de sistema de realidad virtual (RV), pretende enseñar a las personas con autismo a comprender el comportamiento habitual de otras personas, a comunicarse de manera efectiva con ellas y a desenvolverse cómodamente en aquellas situaciones y entornos que les resultan difíciles e incómodos. El uso de tecnología de RV en INMER-II posibilita la inmersión del usuario con autismo en un entorno virtual de apariencia próxima a la real, en el que puede desenvolverse naturalmente gracias a ciertos dispositivos, como un casco de RV, guantes sensorizados y posicionadores electromagnéticos. La creación de dichos entornos virtuales persigue la simulación de situaciones reales, tales como "la compra en un supermercado", de forma que el usuario autista se "traslade" al nuevo entorno virtual y pueda aprender allí a desenvolverse de manera natural, para finalmente generalizar lo aprendido en entornos reales.
El sistema contempla diferentes técnicas educativas comunes en autismo, como son el uso de videos para mostrar explicaciones o anticipar eventos, e integra nuevos elementos como los llamados "actores virtuales", encargados de la comunicación con el usuario/a y por tanto de su aprendizaje. Para conseguir "humanizar" a estos nuevos personajes el sistema hace uso de técnicas de inteligencia artificial (IA). Estas técnicas, tal y como describiremos en el artículo, persiguen la definición y manejo del conocimiento que será implantado a los nuevos actores. Este conocimiento, necesario para que los actores sean capaces de "actuar" dentro del nuevo espacio virtual, está basado en un modelo de representación del mismo estudiado en IA y conocido como motor de inferencia. Este modelo de representación del conocimiento lo consideramos especialmente atractivo como herramienta educativa dado que el sistema conoce las reglas implicadas en los comportamientos que se pretenden aprender o reforzar, y por tanto puede mostrarlas, utilizando para ello algún recurso gráfico, en los momentos oportunos de la simulación.
Éste y los anteriores aspectos comentados pretenden estar en línea con el consenso universal existente sobre lo que debe ser la intervención educativa en autismo, y desde este punto de vista se ha planteado la evaluación de la efectividad de esta ‘enseñanza asistida por ordenador’ de una manera objetiva.
2. AUTISMO E INVESTIGACIÓN
El autismo y, en general, los trastornos del espectro autista, son trastornos del desarrollo, de origen neurobiológico, cuya causa específica, de componente genético, aún se desconoce con detalle. Las personas con autismo se caracterizan por manifestar una triada de alteraciones (Wing, 1988): en la interacción social, en la comunicación y en la imaginación –especialmente en la imaginación social. La investigación actual sobre la etiología de éste síndrome se centra en averiguar con detalle los orígenes genéticos de esta problemática, en explicar cómo dichas bases genéticas dan lugar a las anomalías biológicas (Shattock y col., 1990) y neurobiológicas que se conocen (Courchesne, 1989), cómo éstas producen los déficits cognitivos propios de las personas con autismo (Frith, 1992) y, finalmente, cómo estos déficits generan la triada de alteraciones que, como se comentaba más arriba, definen el síndrome de autismo.
La intervención educativa también parece conseguir grandes avances hoy en día, aunque no así la investigación sobre la efectividad de la misma. Si bien es cierto que hay gran cantidad de estudios sobre la efectividad de los distintos métodos y terapias, según concluye Rita Jordan en su Revisión (Jordan, 1998) son muy pocas las evidencias encontradas en dichos estudios. Entre ellas cabe destacar las encontradas por Howlin y sus colaboradores (Howlin, 1998) que demuestran la eficacia de algunas de las técnicas utilizadas en este proyecto y que, por tanto, es de especial relevancia para los objetivos de evaluación del mismo. Dicho estudio, que analiza el uso de técnicas para la enseñanza de la comprensión de las emociones y creencias, concluye que: ‘se encontraron cambios significativos ocurridos en las áreas específicas seleccionadas después de un periodo relativamente corto de entrenamiento (Howlin, 1998. página 16)’. Las técnicas que se analizan en dicho estudio están basadas en la enseñanza de la elección de rostros adecuados a diferentes situaciones sociales y son muy similares a algunos de los ejercicios planteados en INMER (cuya incorporación, por otra parte, encuentra su origen en este tipo de trabajos).
3. OBJETIVOS PRINCIPALES DE LA EDUCACIÓN UTILIZANDO RV
3.1. Planteamiento educativo
La herramienta educativa que se está desarrollando en el proyecto INMER pretende, en línea con el consenso universal que parece haber sobre lo que debe ser la intervención educativa en autismo (Rutter, 1996; Jordan, 1998), enseñar a las personas con autismo a comprender a las otras personas, a comunicarse de manera efectiva con ellas y a desenvolverse cómodamente en aquellas situaciones y entornos que les resultan difíciles e incómodos.
3.2. Entornos
Cuando hablamos de intervención en educación especial, no solo lo hacemos de capacidades, sino también de entorno/s, y es entonces, cuando las demandas de estos últimos hacia el individuo pueden producir un desajuste o mal funcionamiento. Cuando hablamos de entorno lo hacemos como los lugares "concretos" donde la persona vive, trabaja, aprende, se socializa e interactúa. El trabajo en entornos naturales es un elemento fundamental para personas con serios problemas para el manejo de representaciones mentales complejas, de alto valor simbólico, y esto porque el entorno natural - aquí virtual -: Posee señales claras que posibilitan la anticipación; que posibilitan así mismo experiencias activas y con sentido; que aportan consecuencias relevantes y satisfactorias para la persona que lo usa
El supermercado es un entorno más en el que a diario se desenvuelven las personas con discapacidad o al menos así entendemos que podría ser. En el diseño del sistema se han tenido en cuenta las incapacidades manifiestas de simbolización y también se pretende favorecer la manipulación física, la experimentación "real" por parte del usuario del sistema, lo que se espera de lugar a buenos niveles de aprendizaje, las personas con autismo y / o deficiencia mental encuentran en la experimentación su fuente de aprendizaje, facilitando la autorregulación de la persona.
3.3. Descripción de la Interfaz de Realidad Virtual
En todo momento interactúan con el sistema tanto el tutor o profesor como el usuario con retraso mental o autismo. El tutor dispone de un panel de control, en pantalla plana, desde el que puede manipular externamente el entorno virtual. Por otra parte, la persona con autismo dispone de un casco inmersivo y unos guantes con los que podrá desenvolverse por el entorno virtual y manipularlo internamente (en la variante inmersiva).
Como sabemos, el aprendizaje de cualquier individuo no solamente está condicionado por las capacidades de éste sino que también depende de que el método utilizado tenga la competencia de poder llegar a él, de ser capaz de comunicarse con él. Así, desde el punto de vista de la comunicación, la utilización de los sistemas inmersivos proporciona un valor añadido: el usuario se encuentra completamente inmerso en el entorno en el que se quieren trabajar sus propias habilidades cognitivas y sociales. Por otro lado, en lo relativo a competencias de comunicación del usuario, también se ha tenido en cuenta el uso de sistemas alternativos (p.e. uso de pictogramas, lenguaje de signos, etc.).
La aceptación, por parte de las personas con autismo, de los dispositivos utilizados fue demostrada dentro de este proyecto en un estudio realizado sobre un prototipo en el año 1998. Sobre una muestra de 40 personas con autismo se encontró que 39 de ellas aceptaron el sistema y lo encontraron atractivo y divertido.
3.4. Técnicas de enseñanza utilizadas
Por un lado, el sistema INMER ha sido diseñado como herramienta de enseñanza explícita, ya que su uso consistirá en el desarrollo de unas sesiones preprogramadas y bien controladas en las que participarán profesor y usuario/ s, y en las que se pondrán en uso una serie de técnicas de enseñanza habituales en la intervención educativa en autismo. Por otro lado, al creer que la experimentación en situaciones reales supone la mayor fuente de aprendizaje de las personas con autismo, se ha decidido llevar a cabo, dentro de los entornos virtuales, una "simulación" de situaciones reales, en concreto se lleva a cabo una simulación de la actividad en un supermercado. Por tanto, podemos decir que, si bien se trata de una herramienta de enseñanza explícita, las estrategias utilizadas dentro de INMER también son de enseñanza implícita, y se espera que este aspecto facilite la generalización o transferencia de lo aprendido en el supermercado virtual al supermercado y otros entornos reales.
Entre las técnicas utilizadas con carácter explícito destacaríamos el Uso de videos:
Y el uso de técnicas de Comunicación Total: los actores utilizan lenguaje oral y signado al mismo tiempo con el objetivo, entre otros, de favorecer la aparición / mejora de lenguaje.
La mayoría de las actividades posibles en nuestro sistema suponen experiencias que solamente pueden llevarse a cabo mediante la tecnología de los sistemas inmersivos de realidad virtual. Además se espera que faciliten el avance en la investigación psicológica del retraso mental y autismo, ya que permitirán experimentar sobre aspectos que de otra manera resulta muy difícil hacerlo, aspectos tales como la imaginación o la capacidad de ver lo que los otros piensan.
4. TECNOLOGÍA INVOLUCRADA
En este punto realizaremos una descripción desde el punto de vista técnico de la configuración del prototipo desarrollado así como de las distintas técnicas de realidad virtual empleadas en la implantación del sistema INMER.
4.1. Arquitectura del sistema
Uno de los requerimientos adicionales que añadimos durante el planteamiento del sistema, además de cumplir con las capacidades destacadas anteriormente, fue el desarrollar un prototipo sobre plataformas de bajo coste con el fin de poder generalizar su uso, en caso de que los resultados de la evaluación dieran validez al mismo.
El sistema se compone de dos ordenadores personales, uno de ellos con el sistema operativo Linux (el encargado de la representación gráfica) y el otro con sistema NT (Puesto del controlador). El ordenador con LINUX se encarga de varias tareas: la más importante (la que más recursos consume) es la del dibujado en tiempo real de la escena, además de realizar la gestión de colisiones (Hubbard, 1995) y reproducir sonidos 3D que ayudan a mejorar la sensación de inmersión en el entorno.(Begualt, 1994). También ha de estar en constante comunicación con el ordenador del controlador (por medio de sockets), pues ha de atender las peticiones de éste y enviarle datos de interés. La selección de un sistema como LINUX ha venido motivada principalmente por la disponibilidad de una librería gráfica de soporte de altas prestaciones, comúnmente utilizada en el campo de la simulación visual profesional, se trata de la librería gráfica IRIS Performer (Hellman, 1994). Optamos por ella por su robustez y fiabilidad aún sabiendo que esto hacia algo menos accesible o amigable el sistema, no obstante hoy por hoy los entornos gráficos de este sistema lo hacen casi tan sencillo de manejar como los entornos Microsoft.
El ordenador del controlador se encarga de configurar la sesión y controlar en todo momento algunos parámetros de la misma, además de gestionar las comunicaciones con los posicionadores del casco de realidad virtual (Head Mounted Display: HMD) y los de los guantes de datos (DataGlobe). Esta información es la que proporciona al entorno gráfico los datos base para la generación de la imagen que representa el entorno. El casco proporciona la información del punto de vista y la dirección de visión y el guante se utiliza para la interacción con los objetos del entorno.
En la figura 1 se muestra un esquema general de los componentes principales del sistema INMER.
Figura 1 Esquema de Componentes de Sistema.
4.2. Descripción del Escenario Virtual y Funcionamiento del sistema.
El escenario virtual del proyecto INMER consiste en un supermercado en el que existen diversos modos de funcionamiento además del habitual (realizar la compra). El supermercado consta de una entrada y diferentes secciones como frutería, carnicería, pescadería, cajas de pago y pasillos con estanterías por los que se podrá circular. A lo largo del recorrido el usuario puede encontrarse con varios personajes, empleados de la tienda y otros clientes, lo que permitirá la resolución de problemas y situaciones sociales, interesantes en el aprendizaje del niño autista. Además existe un personaje acompañante de carácter opcional que acompaña al usuario narrando los pasos de éste por el sistema, participando en las distintas actividades y prestando ayuda en algunas ocasiones. Las diferentes secciones en las que se divide el entorno son las siguientes: Acceso al supermercado, Zona de recogida de carros de la compra, Cajas de pago, Pasillos y estanterías, Colas de espera, Carnicería, Pescadería, Frutería.
En la figura 2 podemos ver dos de las secciones anteriores:

4.4. Interfaz de usuario
El desplazamiento "grueso" por el supermercado se realiza mediante una barra de agarre del carro. Esta barra será tanto virtual (modelo 3D) como real (barra acoplada a un joystick) y permite al usuario sentirse inmerso en el entorno debido al control que tiene sobre el desplazamiento por el supermercado.
Una vez desplazado el usuario al punto de interés, podrá moverse por los alrededores del carro con la ayuda de tres posicionadores 3D (uno para el casco y otro para cada mano), además de dos guantes de realidad virtual. Habrá un modelo virtual para cada mano, que permitirán interactuar con los objetos de la escena tocándolos o cogiéndolos.
En todas las secciones el usuario tendrá disponible una serie de botones incrustados en una botonera (figura 3) que servirán para activar y desactivar los distintos modos de funcionamiento posibles; además dentro de cada modo de funcionamiento podrán desplegarse distintas botoneras con las que el usuario podrá intervenir. La botonera tiene dos posiciones, según se esté usando o no. Al pulsar cada botón de cada botonera, el usuario escuchará el sonido de la palabra que represente su función (que servirá para proporcionar "feed-back" al usuario). Dentro de las botoneras aparecerán dos tipos de botones: botones con pictograma o botones con fotografía, representando un objeto o una acción, que facilitan su entendimiento por parte del usuario. Además el usuario dispondrá de una lista de la compra en la que se representan los objetos que ha de comprar, indicados por una foto, un pictograma o un texto con su nombre. La lista permite además proporcionar ayuda al usuario (al seleccionar un objeto de la lista se destacan los objetos de ese tipo del entorno, se destaca en la lista el objeto más próximo, etc).
Figura 3. Izq: Botonera del usuario Der: Botonera con la lista de la compra activa:
Como se ha dicho anteriormente, el sistema posee diferentes modos de funcionamiento que controlan el tipo de acción desarrollada cuando el sujeto interactúa con un objeto. Dichos modos de funcionamiento han sido extraídos de los estudios y análisis comentados en el punto anterior. Los modos básicos son (en la figura 3 se muestran algunos ejemplos):
4.5. Actores Virtuales y Motor de Comportamiento
Uno de los objetivos principales del proyecto consiste en introducir al usuario en situaciones sociales comunes, lo que incluye la interacción con personajes que deben tener un comportamiento más o menos natural, aunque se trate de mantener un aspecto de cómic para mejorar la relación de los sujetos con el entorno (ver figura 4).
El uso de actores virtuales involucra dos problemas no triviales de resolver en el campo de los gráficos 3D tiempo real. Por un lado tendremos la problemática de la representación gráfica de los movimientos de dichos actores y por otro lado tenemos la problemática asociada con la generación de comportamiento más o menos reactivos de los actores virtuales ante las acciones del usuario.
La representación gráfica de los actores se ha basado en la extensión de los grafos de escena tradicionalmente empleados en los gráficos tiempo real con un soporte especial para figuras articuladas de tipo humanoide. Este tipo de estructuras han venido estudiándose en el grupo ARTEC desde hace algunos años (Rodríguez, 1999). Utilizando estas estructuras de datos como soporte, el sistema utiliza técnicas de fotogramas clave (keyframing) para la generación de los movimientos en las articulaciones base de los actores.
La técnica fotogramas clave, consiste en considerar los grados de libertad dados a los nodos esqueleto del actor como parámetros, de manera que se crean un conjunto de valores apropiados de los mismos para determinados momentos en una secuencia de movimiento (que se almacenarán en una tabla de keyframe) y los valores intermedios son calculados por interpolación.
La apariencia final del movimiento creado se obtiene recalculando las imágenes en cada instante a partir de los valores de los parámetros establecidos o calculados. De esta forma es posible crear determinados movimientos independientes (andar, saludar, agacharse… en el caso de un personaje de apariencia humana), obteniéndose el movimiento general del actor mediante la combinación de estos movimientos simples.

Figura 4. El actor acompañante recorriendo el supermercado
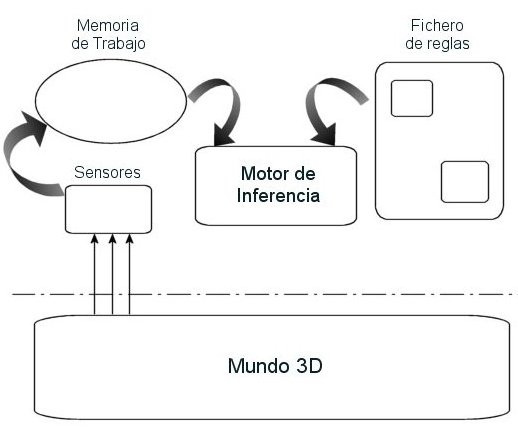
El otro elemento importante para una adecuada inclusión de los actores virtuales hace referencia a su capacidad de reacción ante las acciones del usuario y su comportamiento natural dentro del entorno virtual en el que se sitúa. Para esto se han empleado técnicas de Inteligencia Artificial (Nilson, 2001), con el propósito de representar mediante un sistema experto basado en reglas de comportamiento la definición y manejo del conocimiento que se asocia a cada uno de los actores. De esta manera el sistema de comportamiento del agente virtual estará compuesto por los siguientes componentes principales: la base de conocimiento, el motor de inferencia y la memoria de trabajo. Por un lado, la base de conocimiento codifica en forma de reglas (ver figura 5.a)) aspectos relativos a la intención, estado del actor y del mundo, además de las acciones a realizar en un entorno determinado y la memoria de trabajo está formada por los hechos que se consideran válidos y que serán contrastados. Por otro lado, el motor de inferencia se compone de todos los procesos que manipulan la base de conocimiento y que permiten deducir la información necesaria para determinar el comportamiento adecuado del actor en cada momento, mediante la validación de las reglas de producción en función de la memoria de trabajo y la base de hechos. En la figura 5.b se muestra un esquema del motor de comportamiento o sistema experto que se asocia al actor.
| Regla:
[1: Pide (X, ayuda), 2: Estado_anímico (contento), 3: Amistad (X, Buena), 4: Amabilidad (Complaciente) 5: Mi_identidad (Guía)] è [ inserta (Quiero_Responder (X, ayuda)), inserta (Intencionalidad (sincera)].
|
 |
| a) | b) |
Figura 5: a) Ejemplo de regla de comportamiento; b) Esquema de componentes del motor de comportamiento.
Por lo tanto, cada actor tendrá asociada una base de hechos iniciales que representan estados, intenciones y características propias del actor y un conjunto de reglas que en función de los hechos disponibles se irán activando y validando produciendo modificaciones en la base de hechos. El motor de inferencia, al tomar decisiones realizará cambios sobre la memoria de trabajo mediante acciones tales como insertar un determinado hecho o eliminarlo porque ya no es cierta su validez debido a los cambios producidos. Esto permitirá controlar y condicionar las acciones del actor a los cambios producidos en el entorno virtual en el que está inmerso y por tanto responder de forma correcta a las acciones que el usuario realice en cada momento, consiguiendo con ello un alto grado de interactividad entre el usuario, el entorno y los actores que aparecen en él.
5. DIFICULTADES EN LA LECTURA DE LA MENTE DE OTROS Y TÉCNICAS DE I.A. COMO APOYO
Las ventajas de utilizar técnicas informáticas en la intervención educativa de las personas con autismo residen no solo en la utilidad final de dichas técnicas sino también en los procesos inherentes a las mismas. En este sentido, los modelos de representación de conocimiento conocidos como motor de inferencia ofrecen una serie de ventajas que comentamos a continuación.
5.1. Leer la mente de los otros
En 1985, Simon Baron-Cohen, Alan Leslie y Uta Frith publicaron un trabajo de gran impacto teórico en el campo de la Psicología Básica titulado ‘Does the autistic child have a theory of mind’. La hipótesis planteada por estos autores es la de que el componente central del autismo puede encontrarse en una incapacidad para ‘leer las mentes’ de las personas y atribuirles estados mentales independientes tales como creencias y deseos sobre las cosas. La capacidad para inferir o ‘leer la mente de los otros’, que los niños normales desarrollan alrededor de los 3 años y medio, se considera el resultado de un mecanismo cognitivo innato especializado en la elaboración de un tipo muy concreto de representaciones: las representaciones de los estados mentales.
5.2. Entender las decisiones de otros
Dentro del mismo campo y tras la aplicación de varias pruebas neuropsicológicas como el ‘Test de Clasificación de Wisconsin’ o la prueba de la ‘Torre de Hanoi’, Ozonoff, Pennington y Rogers propusieron la hipótesis de que gran parte de las alteraciones del autismo podían ser un reflejo de una alteración básica que afectase a las ‘funciones ejecutivas’ o de control, que son un conjunto de capacidades que permiten organizar eficazmente las conductas dirigidas a una meta y la resolución de problemas complejos. Son estas funciones, por tanto, las que permiten a las personas realizar algún tipo de plan y tomar determinadas decisiones y se encuentran alteradas cuando hablamos de personas con autismo (Hobson, 1995). Por tanto si debemos de escoger el tipo de razonamiento que pretendemos mostrar como ‘pensamiento’ de los agentes virtuales, los modelos de representación del conocimiento que incluyen los denominados ‘árboles de decisión’ parecen ser los más adecuados para este cometido.
Las técnicas informáticas de IA conocidas como de motor de inferencia (clásicamente utilizadas en los sistemas expertos) permiten la lectora de los procesos internos de los agentes haciendo posible mostrar el proceso de toma de decisión seguido por ellos (ver punto anterior). Si además consideramos que las personas con autismo parecen tener dificultades para manejar mentalmente representaciones de varios conceptos al mismo tiempo (Jordan, 2000), entonces adquiere un valor añadido el hecho de poner a su alcance (visualmente) los distintos elementos que supuestamente intervienen en la toma de decisiones de las personas.
5.3. Mostrando el pensamiento
Cuando se trata de mostrar ‘representaciones mentales’ parece que lo más adecuado es asociar los recursos gráficos oportunos a las cabezas de los actores virtuales, y esto puede hacerse de una manera conocida incluyendo dichos recursos en el interior de una burbuja o bocadillo de cómic que reflejará lo que los agentes virtuales están "pensando" en cada momento y ofrecerán una oportunidad, a la persona con autismo, para poder leer el supuesto pensamiento o contenido –dinámico– del espacio mental de los actores virtuales.
Figura 6: Expresión de ironía
6. EVALUACIÓN
La pregunta que parece interesante responder en este momento sería, más que la evaluación por separado de cada técnica utilizada, si «la realidad virtual supone una nueva técnica, con sus propias ventajas específicas en cuanto a que facilite la generalización, y también con la ventaja, de que optimice el beneficio de las otras técnicas existentes al combinarlas eficientemente dentro de una misma actividad educativa». La analogía del puzzle, tan utilizada en autismo, nos sirve ahora para ilustrar esta idea. En nuestro puzzle contaríamos con muchas piezas periféricas, que supondrían cada una de las técnicas –válidas en autismo- utilizadas en nuestro sistema. La pieza restante, la central, podría ser la utilización de sistemas de realidad virtual (aunque tan solo se pretende que se trate de una herramienta válida más):
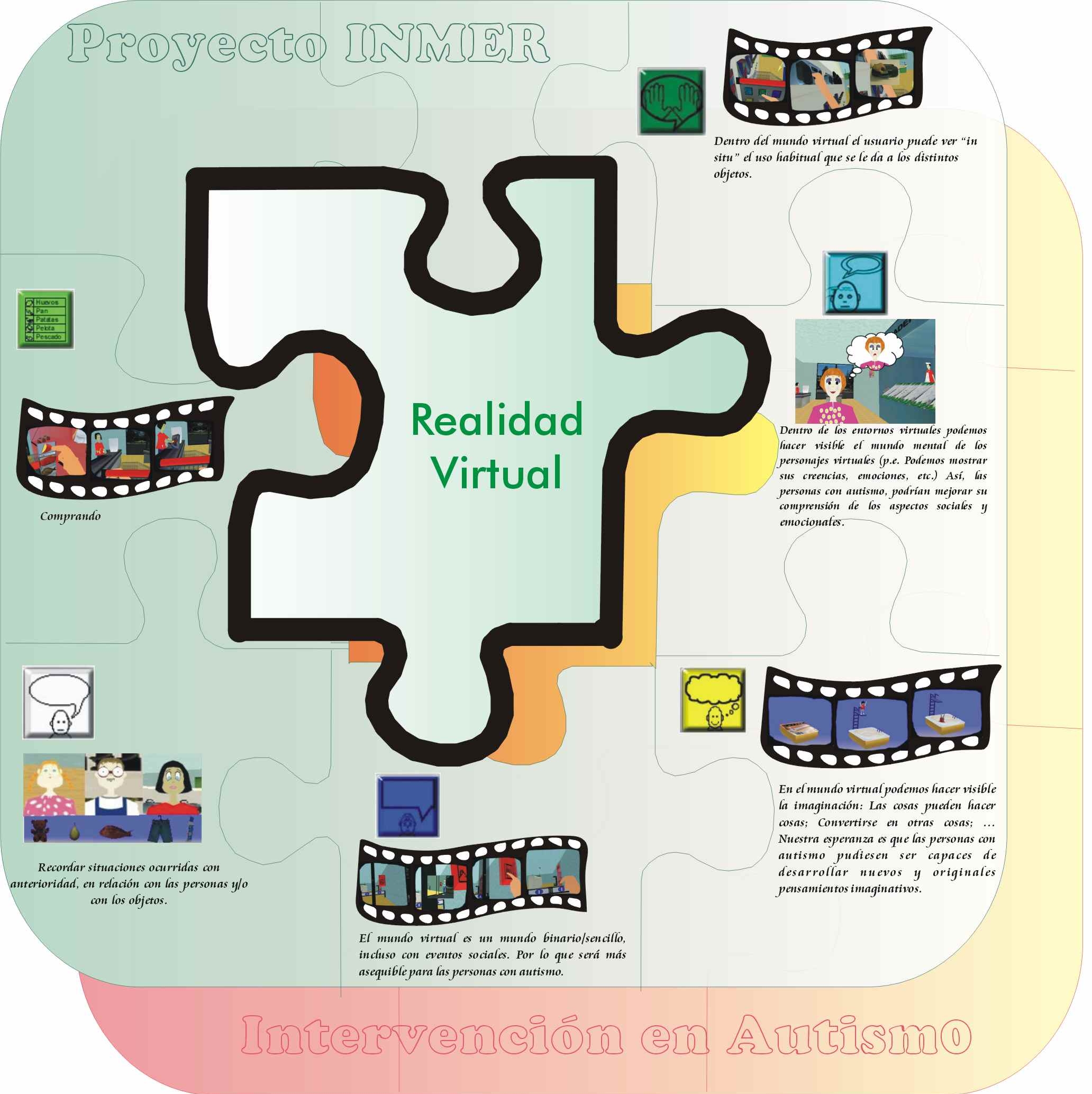
Figura 7: Imagen de ‘nuestro puzle’
6.1. Limitaciones a tener en cuenta a la hora de diseñar la evaluación
- Limitaciones propias de la investigación sobre intervenciones educativas en autismo y del estado de la misma: Según ha concluido Rita Jordan en su revisión de las investigaciones sobre intervenciones educativas en autismo (Jordan, Jones y Murray, 1998), no existen evidencias científicas contrastadas sobre la eficacia de la mayoría de las intervenciones educativas. Tan solo existen ciertas evidencias experimentales que, todavía, necesitan de gran esfuerzo investigador. El desconocimiento sobre las variables individuales que pueden hacer efectivas las distintas técnicas utilizadas en INMER dificulta, por tanto, el estudio actual. Así, parece lo más adecuado aislar y evaluar lo que es específico de INMER. Otra dificultad añadida es el hecho de que, en la intervención en autismo, se cree que la experimentación en entornos naturales es más efectiva, por lo que resulta difícil delimitar dónde comienza y termina la intervención y esto repercute también en los límites de la evaluación.
- Limitaciones tecnológicas: A la hora de estudiar si la Realidad Virtual (RV) supone una herramienta válida es importante constatar que las posibilidades de la RV hoy son muy superiores a las de la RV que utilizó Dorothy Strickland (Strickland, 1992) en su primera aproximación en 1992 y también a las posibilidades que previsiblemente tendrá esta tecnología una o varias décadas más tarde. Las principales diferencias entre el estado de la tecnología en el año 92 y el actual se dan en términos de tamaño del campo de visión, de resolución y calidad de la imagen, de sensación de inmersión, de comodidad del uso y de ilusión de realidad. Por tanto, el estudio que aquí se plantea y las conclusiones que puedan extraerse del mismo serán válidas solamente para las configuraciones posibles de RV actuales, y habrá de replantearse de nuevo el estudio cuando estas hayan cambiado significativamente. Por tanto, si pudiésemos conseguir una realidad virtual perfecta, en la que lo virtual fuese indistinguible de lo real, el planteamiento del estudio sería distinto.
6.2. Planteamiento de la evaluación y pruebas
Para valorar los aspectos relevantes, un posible planteamiento será producir versiones del sistema en distintos soportes: inmersivo, pantalla táctil y papel (secuencia de instantáneas del entorno virtual). A continuación se valorará el beneficio sobre cada uno de ellos y también sobre el entorno real. Esto permitiría valorar el beneficio de la simulación con Realidad Virtual frente a la simulación utilizando papel (material similar al que se utiliza actualmente en la intervención educativa de personas con autismo) y frente a los ejercicios realizados en entornos reales.
6.3. Objetividad del estudio: doble ciego
Para facilitar la evaluación objetiva se pretende producir vídeos que recojan el estado de los usuarios (en cuanto a las habilidades objeto de trabajo) en distintos momentos y en los que nunca aparezcan las herramientas de intervención utilizadas. Estos videos serán analizados por evaluadores independientes, que no pertenecerán al equipo del proyecto, que desconocerán qué sujetos de la muestra utilizan realmente el sistema y que también serán ciegos al propósito del mismo. Las diferentes pruebas habrán de pasarse, por tanto, en los contextos reales en los que las habilidades relevantes se ponen en práctica. En relación con la medición de la satisfacción, una posible herramienta sería el ofrecimiento sistemático de diversas opciones al usuario de manera que, cada vez, pueda elegir entre ellas. La realidad virtual sería una de estas opciones.
7. REFERENCIAS
[OBJETIVO] [COMITÉS] [PARTICIPANTES] [ÁREAS] [ACTIV.INTERNACIONALES] [PROGRAMA] [MESAS REDONDAS] [S. CIENTÍFICAS] [S. TECNOLÓGICAS] [PÓSTERS] [INSCRIPCIÓN]
Última actualización: miércoles, 04 de abril de 2001